General Laser is the European distributor of INNOVIZ lidar sensors
for non-automotive applications.
for non-automotive applications.


Next-Generation, Low-Cost, Automotive-Grade LiDAR
InnovizTwo is Innoviz’s new high-performance, automotive-grade LiDAR sensor which offers a fully featured solution for all levels of autonomous driving at dramatically lower cost.
Enabling Safe Mobility for AllInnoviz has announced a new generation of its LiDAR sensor, InnovizTwo, which solves a significant bottleneck in the industry. To allow a safer and smoother adoption of automation, the industry will need to introduce L2+ functionality with hardware that supports L3 and L4 upon launch. Due to its reduced cost and enhanced performance, InnovizTwo will allow more car manufacturers to offer safe L2+, while paving the path to full L3 automation in the most efficient and safe way. With InnovizTwo, car manufacturers, Tier-1s and Innoviz will be able to collect data through their customer base. As new features will continue to be validated and, later, statistically proven. This dynamic will eventually lead to the car’s software to be upgraded to full L3 without any hardware change. |
 |
|
0.05°x0.05° Maximum Angular Resolution (HxV) |
10, 15, or 20 FPS Pre Configurable Frame Rate |
0.3m-300m Detection Range |
|
120°x40° Maximum Field of View (HxV) |
46x137x132 Dimensions (HxWxD) |
ASIL B(D) ISO 26262 Compliant |
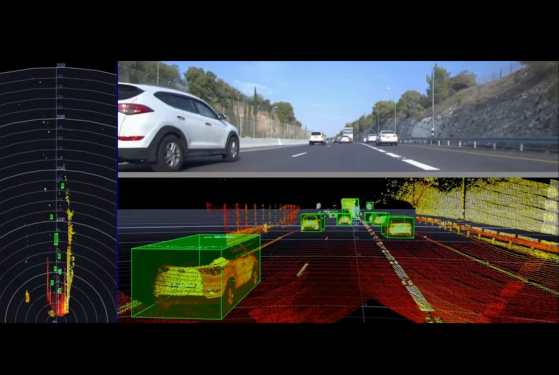
InnovizTwo features an embedded automotive-grade Perception Platform (InnovizAPP) that includes classification and detection capabilities in addition to the point cloud.
Configurable Regions of Interest
InnovizTwo has four individually-controlled regions of interest for dynamic focus in a limited FOV. This allows for enhanced visibility and range with no impact on bandwidth, resolution or frame rate.
Multiple Reflections
InnovizTwo returns multiple reflections per pixel and records and stores multiple points in a 3D environment. This is important when laser pulses hit rain droplets, snowflakes, or more than one object on its path.
No Gaps Between Pixels
InnovizTwo has no gaps in its scanning pattern due to contiguous pixels, which are critical to building a safe autonomous vehicle perception system. Without this, a system could miss collision-relevant small objects lying on the road’s surface or humans if they are within point cloud data gaps, causing devastating results.
Equally Distributed vFOV
InnovizTwo provides the same high resolution in all regions of the vertical FOV, whereas other sensors provide higher resolution only in the center of the vertical FOV and lose data moving toward the edges. This enables InnovizTwo to obtain more data than other sensors. The InnovizTwo vertical FOV is also built with panning capabilities to support mounting tolerances, as well as varying driving conditions such as vehicle loading.
Resilient to Sunlight and Weather Conditions
InnovizTwo is resilient to ambient light sources, such as direct sunlight and blinding lights from oncoming cars, as well as poor weather conditions such as rain.
Automotive-Grade Perception Software
Innoviz’s advanced perception software, a tool for extracting additional data from the point cloud, is designed to be the perfect complement to the company’s hardware offerings and provides vehicles with a deep understanding of any 3D driving scene. Innoviz was one of the first LiDAR companies to develop perception software to accompany its LiDAR products.
 |
Industry-Leading Software SolutionThe perception software leverages the rich data derived from Innoviz’s LiDAR sensors, coupled with proprietary state-of-the-art AI algorithms, to provide leading objection detection, classification and tracking features, as well as collision classification, localization and calibration capabilities. When deployed alongside and in combination with other sensors’ perception algorithms, Innoviz’s software complements them to enhance performance and safety. The perception software is very resource-efficient and requires low compute power, making it compatible with various automotive-grade compute platforms. This achievement is a key differentiator against hardware-only LiDAR providers. |
Detection, Classification and TrackingDetects objects with high precision. Boasts two independent detectors for identifying objects (i.e. cars, trucks, motorcycles, pedestrians, bicycles) as they appear through their shape and other attributes, and due to their movement. Delivers both high-quality object detection as well as more advanced object tracking (the ability to designate the same object as such in consecutive frames). |
Pixel Collision ClassificationAccurately identifies the driveable area for autonomous and semi-autonomous vehicles by classifying each object in the 3D environment as collision-relevant or non-collision relevant with pixel-level data accuracy. Collision relevant subclasses are broken down into “objects” (i.e. car, truck, bicycle) or “obstacles”, the latter consisting of anything not classified as an object (i.e. tire, debris). |
Calibrates between the sensor’s coordinate system and the vehicle’s coordinate system following vehicle mounting in the assembly line. Also fixes pixels’ spatial displacement, which can occur while driving on bumps and potholes, and due to acceleration and deacceleration.
")
")
")
{kind=link}
{kind=link}