COBOT KIT Mobile Manipulator



COBOT KIT Mobile Manipulator
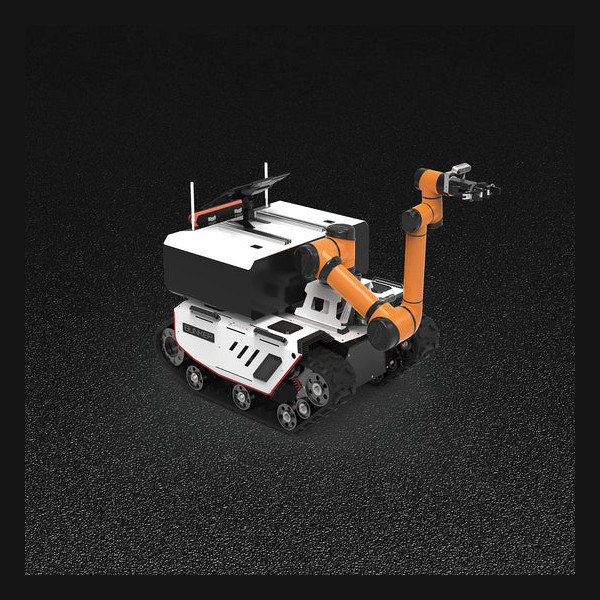
The high performance autonomous cobot Kit for robot educational research and commercial applications development.
The AgileX Cobot Kit package is a robust development platform to kickstart any industrial or educational project. It features a 6-de-gree-of-freedom (DOF) robotic arm, realsense camera, 16-channel lidar, high-performance CPU, 4G router, monitor with an IP 54 rated enclosure, to deliver high precision auto navigation and grasping. It is compatible with various AgileX robotic chassis that allow users to tackle tough indoor and outdoor scenarios such as urban roads, agriculture, mining and power utilities, and more.
Quick mapping-build based on 3D LiDAR point cloud data
Based on AgileX' s ROS PACKAGE,the Cobot Kit' s long-distance, high-precision, and high-performance multi-beam LiDAR allows users to obtain 3D point cloud data for quick mapping, navigation, and positioning without additional configuration of LiDAR ROS nodes.
- 360° environmental scanning, ± 2cm top-level precision, 0.170.2° horizontal angular resolution
- -600,000ptsis real-time high data rates, 150m long detection range with high resolution
- Protection class IP67
A flexible robot arm for easy grasping
As an alternative, the AUBO-i5/xArm6 robotic arm can meet various requirements for the payload, working radius (819-886mm), and positioning precision. It also allows close human-robot interaction during grasping tasks without a safety fence.
 |
 |
|
AUBO i5
|
xArm 6
|
Perfect design for precise grasping
The Cobot Kit adopts articulated adaptive electric grippers, which are simply designed and driven by underactuated control. With a re-peated positioning precision of ±0.03mm and a maximum grasping force of 160N, it can grasp up to 5 contact points of an object and auto-adapt to the shape of the target object.
High precision visual perception
The Cobot Kit is equipped with an Intel Realsense depth camera, with a resolution of 1280 X 720, a frame rate of 90FPS, and a depth field of view (FOV) of 87° x 58°, it is extremely effitive in date collection and scanning.
| Accessories | Accessories list |
| Computing unit | APQ industrial computer |
| Multi-line LiDAR |
Multi-line LiDAR sensor Sensor controller |
| LCD module |
Portable flat panel display USB-to-HDMI cable UBS-to-CAN module |
| Power module |
Switching DC-DC19-72V to 48V power supply DC-to-DC 12V24V48V power supply 24v-12v step-down power module |
| Communication module |
4G router 4G router and antenna |
| Chassis module |
Bunker/Scout2.0/Hunter2.0/Ranger mini Aviation plug (with wire) Onboard controller |
| Features of kit | |
| ROS pre-installed in Industrial Personal Computer (IPC), and ROS nodes in all sensors and chassis. | |
| Navigation and positioning, mapping, and DEMO based on multi-line LiDAR. | |
| Motion control (including point and path control), planning, and static obstacle avoidance based on robotic arm ROS node "Move it" | |
| ROS control over robotic arm gripper AG-95 | |
| QR Code positioning, object color and shape recognition, and DEMO grasping based on Intel Realsense D435 binocular camera | |
")
")
")
{kind=link}
{kind=link}